
Рассматривается процесс установки микрокомпьютера Raspberry Pi на китайскую модель автомобиля с радиоуправлением в масштабе 1:10. Управление машинкой с Raspberry Pi будет выполнятся по Wi-Fi протоколу через Android приложение.
Список оборудования необходимого для проекта:
- китайская RC машинка;
- мини-ПК Raspberry Pi (Model B rev2);
- драйвер бесколлекторного мотора L298N;
- аккумулятор на 5.5v 2700 mah для двигателей;
- аккумулятор на 5v 8000 mah для Raspberry Pi;
- 2х бесколлекторных мотора (из комплекта с моделью автомобиля);
- wi-fi модем (если wi-fi не включен в Raspberry Pi);
Содержание:
- Выбор модели автомобиля
- Установка оборудования
- Питание
- Установка и настройка ПО
- Мобильное приложение
- Запуск модели
1. Выбор модели автомобиля
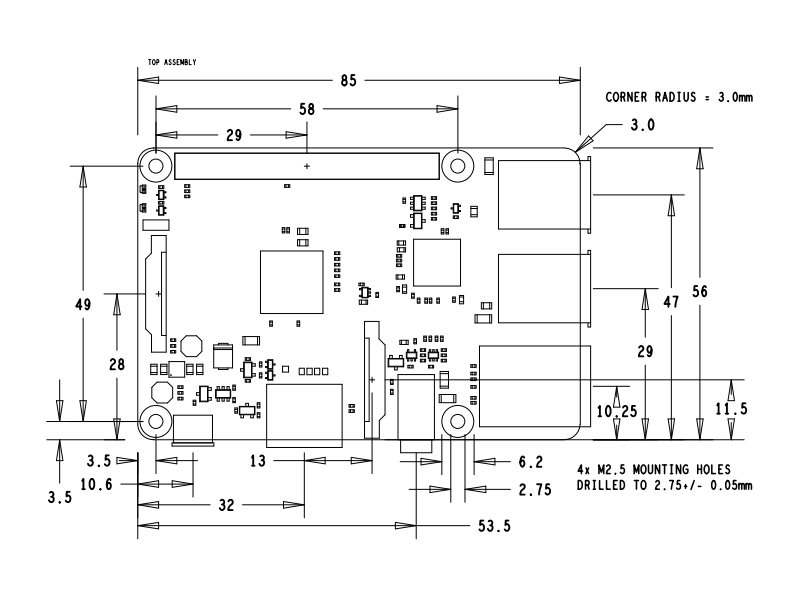
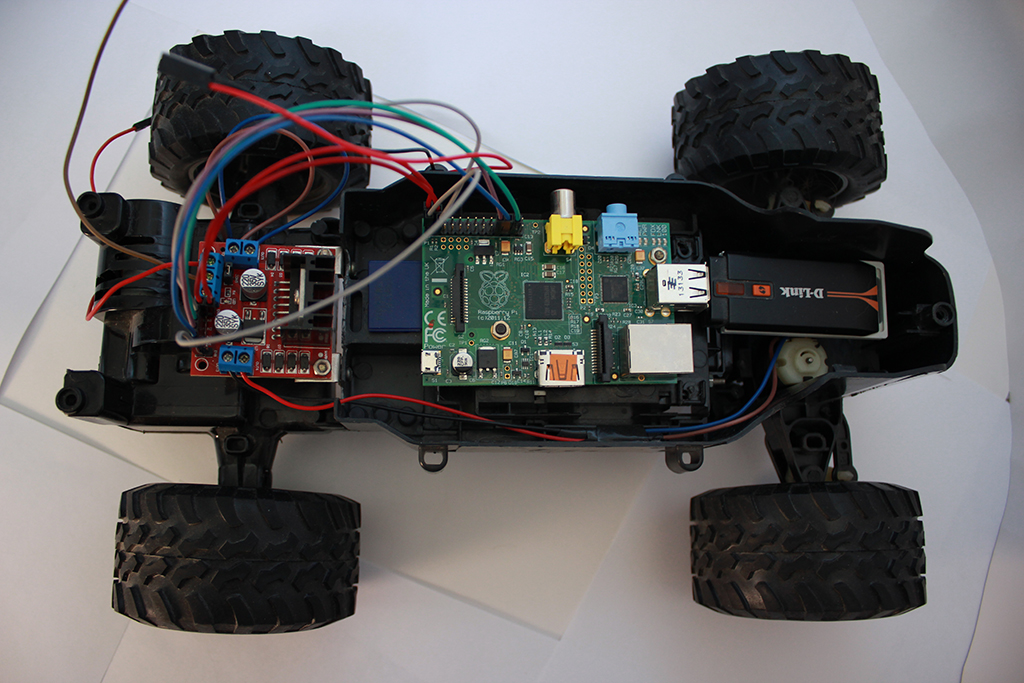
Выбирать модель для переделки необходимо с учетом габаритов компьютера Raspberry Pi (см. рис. 1) и драйвера двигателей (50х50мм). Наиболее подходящий масштаб начинается от 1:10, с основанием модели от 250х70мм. Двигатели модели должны обладать достаточным запасом мощности, чтобы иметь возможность установки на модель дополнительного оборудования весом до 300г (например, внешнего аккумулятора для Raspberry Pi).
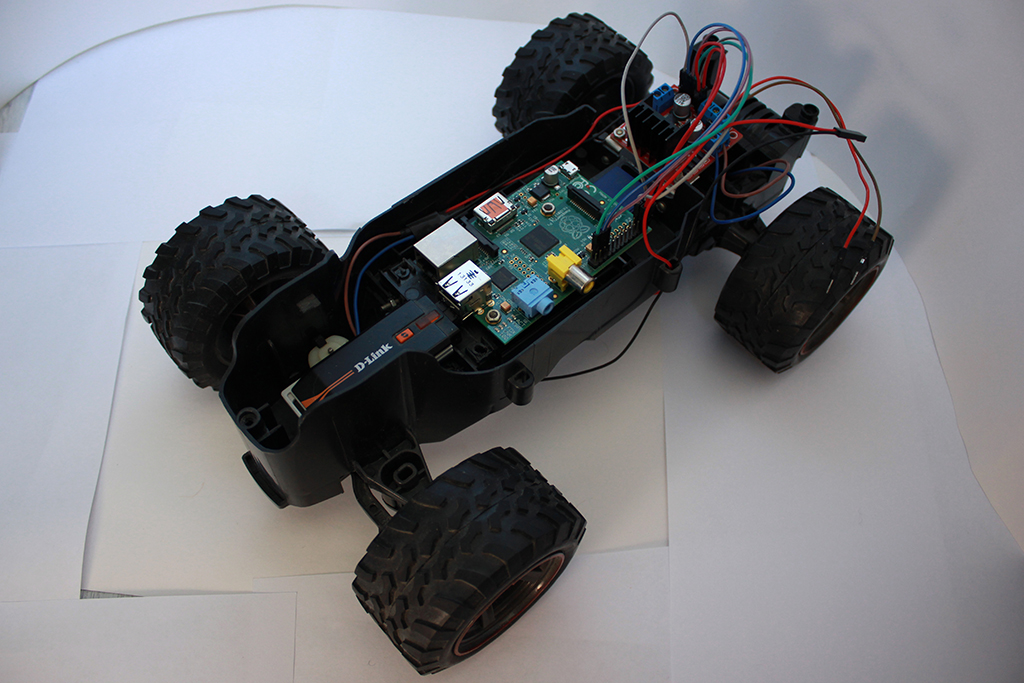
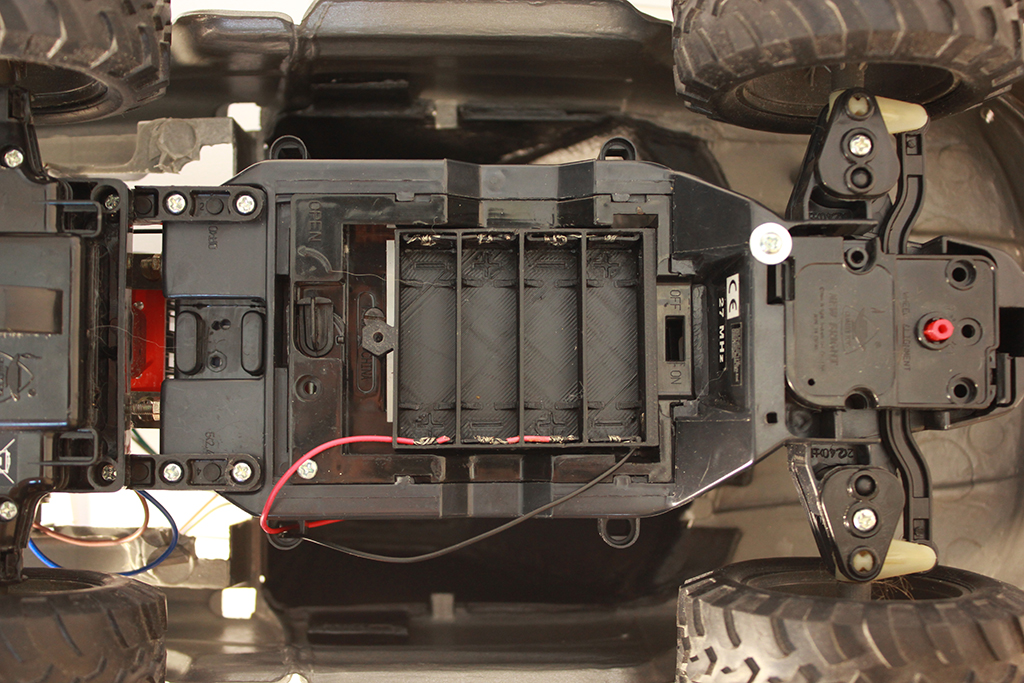
Для данного проекта была куплена радиоуправляемая модель пикапа из магазина игрушек ценой около 1000р. Пикап имеет кузов, позволяющий разместить в нем дополнительный аккумулятор.


2. Установка оборудования
После выбора и приобретения модели её необходимо разобрать и достать все ненужные части. В нашем случае это модуль радиоуправления, вместо него будет установлен Raspberry Pi. Двигатели и блок аккумулятора оставляем.
Аккуратно отрезаем провода, ведущие к бесколлекторным двигателям от модуля радиоуправления, они нам понадобятся для подключения двигателей к драйверу.
Размечаем место на несущей части корпуса для установки Raspberry Pi и драйвера двигателя. Драйвер будет подключен к пинам Raspberry, поэтому размещаем его со стороны наиболее близкой к пинам. Подключаем драйвер к пинам Raspberry Pi по схеме представленной на рис. 2.
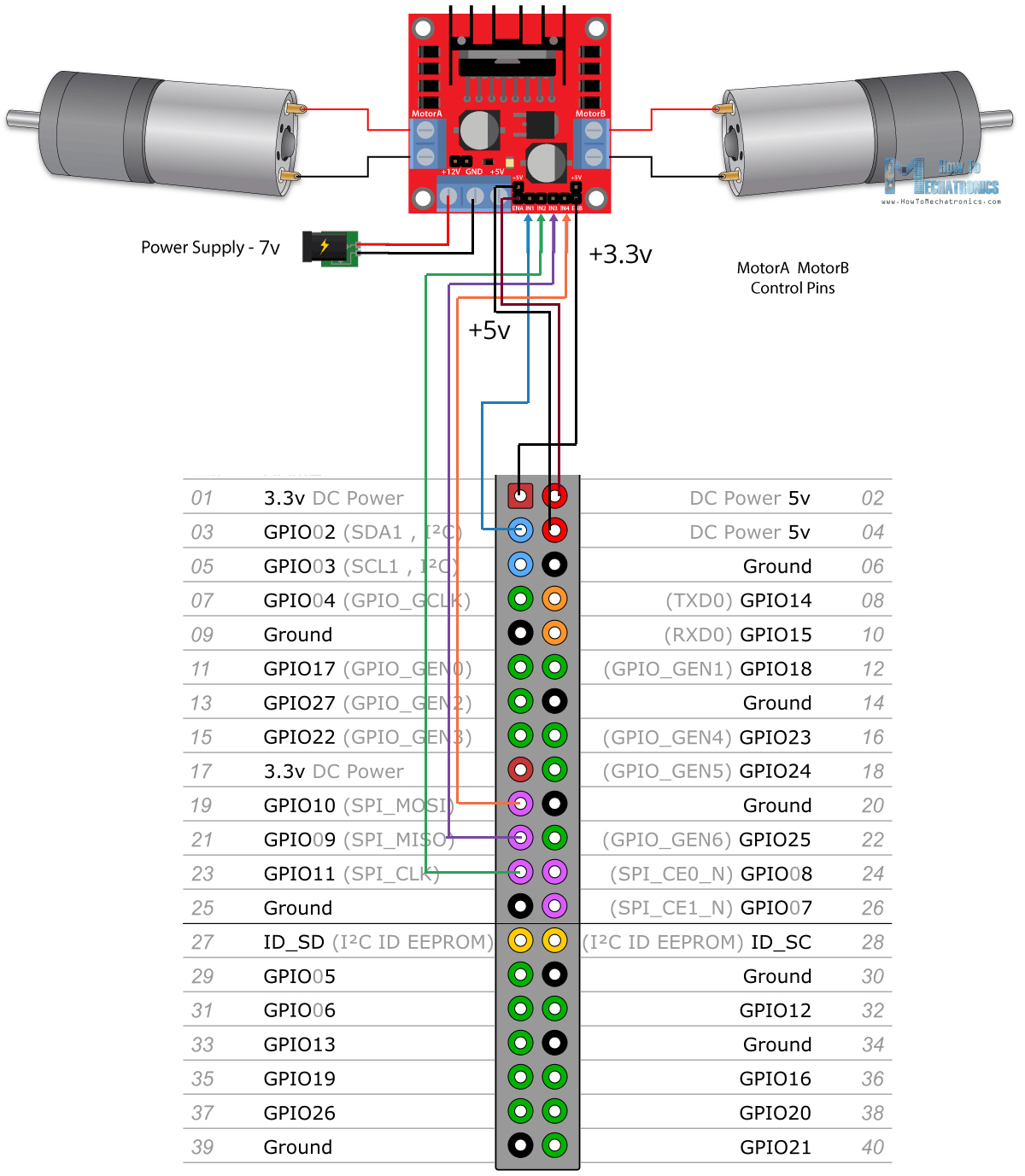
Можете подключать двигатели к любым доступным пинам на Raspberry Pi. В мобильном приложении есть возможность указать номера управляющих пинов.
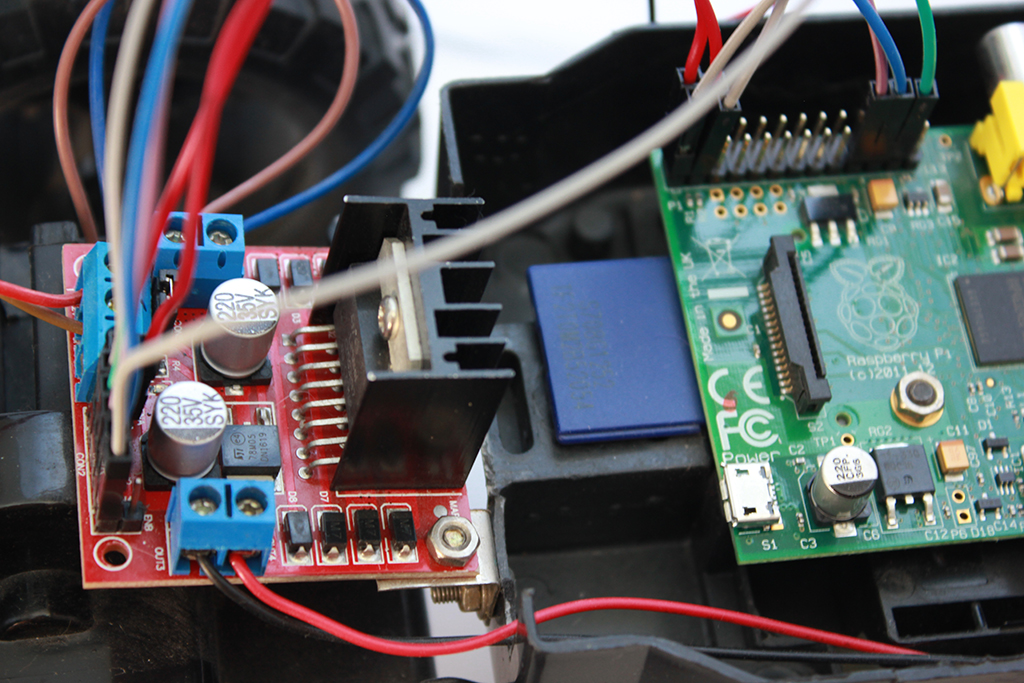
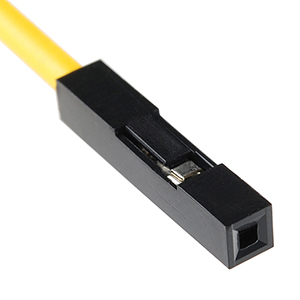
Для подключения драйвера к пинам Raspberry Pi необходимо использовать специальные соединительные провода (рис. 3). Для подключения аккумулятора к драйверу используйте провода с разъемом, чтобы иметь возможность отключать/подключать аккумулятор.
3. Питание
Питание будет осуществляться от двух аккумуляторов. Один аккумулятор мощностью 7v и емкостью 2500 мАч будет питать драйвер и двигатели, можно взять аккумулятор, который шел в комплекте с моделью. Второй внешний имеет аккумулятор имеет мощность 5v и емкость 8000 мАч, он будет питать Raspberry Pi.


4. Установка и настройка ПО
Управление Raspberry Pi по Wi-Fi будет осуществляться при помощи библиотеки «Webiopi». Данная библиотека написана на Python и позволяет управлять пинами Raspberry Pi по HTTP протоколу. Для установки библиотеки «Webiopi» на Raspberry Pi необходимо:
Посмотреть номер последней версии webiopi на сайте и заменить x.y.z на номер последней версии.
Ввести последовательность команд в консоли Raspberry Pi:
$ tar xvzf WebIOPi-x.y.z.tar.gz
$ cd WebIOPi-x.y.z
$ sudo ./setup.shДля быстрого запуска webiopi в фоновом режиме введите команду:
sudo /etc/init.d/webiopi startЧтобы не запускать webiopi вручную после каждого запуска Raspberry Pi необходимо добавить webiopi в автозапуск командой:
$ sudo update-rc.d webiopi defaultsИзменить логин и пароль пользователя webiopi можно командой:
$ sudo webiopi-passwdСтандартный логин pi и пароль raspberry.
Проверить успешную установку webiopi можно зайдя по IP адресу Raspberry на страницу http://ip_адрес_raspberry/webiopi На данной странице вы увидите интерфейс управления портами Raspberry Pi.
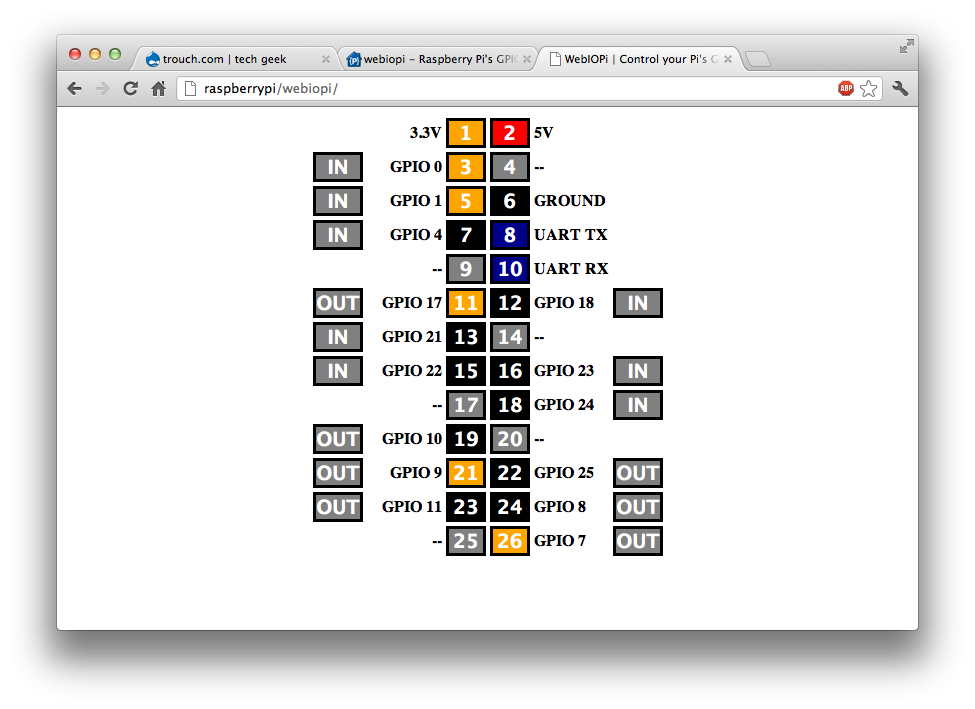
Для поиска IP адреса Raspberry Pi внутри локальной сети можно воспользоваться любым сторонним софтом, например, программой ipscan.
5. Мобильное приложение
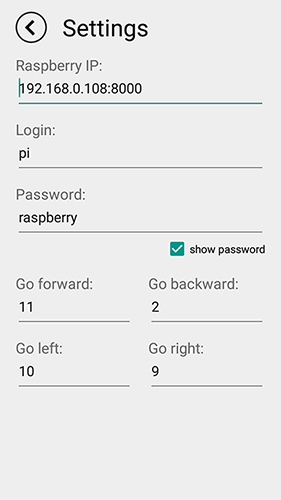
Удаленное управление моделью будет осуществляться с помощью Android приложения, разработанного специально для данного проекта. После установки приложения на смартфон можно ввести данные подключения к Raspberry Pi. В настройках приложения вводим IP адрес Raspberry Pi, логин и пароль пользователя webiopi (стандартный логин pi и пароль raspberry), а также номера портов Raspberry Pi, используемых для управления двигателями.
 |  |
6. Запуск модели
Запуск модели начинается с подключения внешнего блока питания к Raspberry Pi. После чего необходимо дождаться загрузки системы. Если все настроено, библиотека webiopi должна быть запущена автоматически.
Устройство Android, с которого будет осуществляться управление Raspberry Pi должно быть в одной локальной сети с Raspberry Pi. Проще всего подключиться к одному Wi-Fi модему или раздать Wi-Fi с телефона и подключить Raspberry к нему.
Открываем приложение Car Control на мобильном устройстве. Нажимаем на кнопку Car Control. При успешном подключении приложения к Raspberry Pi в строке status будет написано «connected».
После успешного подключения к Raspberry Pi через мобильное приложение можно подключить питание к драйверу двигателей. Если всё подключено правильно на драйвере загорится красный светодиод. Нажатие кнопки в приложении посылает сигнал на Raspberry Pi для включения конкретного пина, после чего сигнал передается на драйвер и соответствующий двигатель начинает вращение.